Background
The advent of unmanned aerial vehicles (UAVs) has opened numerous opportunities for executing perilous and mission-critical tasks such as search and rescue, exploration in radioactive and hazardous environments, inspection of vertical structures, and water sample collection. The task of object collection on water surfaces is challenging due to the following reasons: (i) propeller outwash alters the object’s dynamics, (ii) unpredictable current flows, (iii) extreme reflection and glare off water surfaces affects the object detection, and (iv) noisy height measurements over water surface.
Invention Description
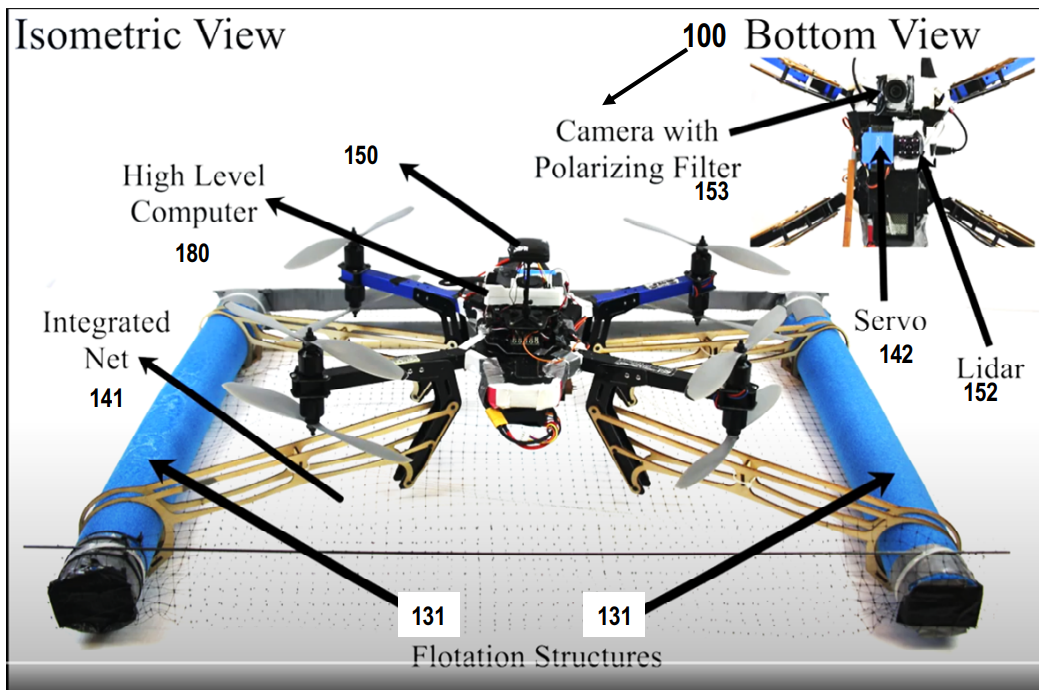
Researchers at Arizona State University and the Salt River Project have developed a multirotor system for autonomous net-based object collection from water surfaces. To eliminate excessive reflection and glare, a linearized polarizing filter is used with an onboard camera. A two-phase object detection algorithm is developed with a specularity removal algorithm to eliminate reflections and an edge-based contour detector for detecting the targeted objects on the water surface. Further, the system includes a boundary layer sliding mode control (BLSMC) methodology, where the dynamic manifold is optimized using model predictive control (MPC), to reduce and minimize position and velocity errors between the UAV and object due to water surface variations. The efficacy of the proposed collection system is validated through multiple outdoor tests by collecting objects of different shapes and sizes with an overall success rate of 91.6%.
A video demonstration can be seen here:
https://www.youtube.com/watch?v=Yj0_LIz027s
Potential Applications
• Object collection from water surfaces
• Autonomous UAV landing on water surfaces
• Unmanned aerial vehicles
Related Publication: Autonomous Vision-Guided Object Collection From Water Surfaces With a Customized Multirotor